Mijn semi permanente opstelling. Een 250mm Newton F4,8 met 100 mm F15 refractor.
De refractor is een Polarex buis maar bezit een Duits objectief omdat het originele Polarexobjectief niet voldeed. Deze polarexkijker is aangeschaft in 1970. De bouw van deze montering is gestart in 1968 en heeft tot 2002 gefunctioneerd met een volgmotor die bestond uit een elektromotor van een antieke gramofoon.
In 2002 heb ik stappenmotoren op beide assen gemonteerd en kon met het freewareprogramma "Scope" van Mel Bartels de kijker totaal worden bestuurd. Deze Bartels-sturing vereist een DOS-computer maar heeft veel uitgebreidere mogelijkheden dan een Synscan-sturing waarmee ik ondertussen ook vertrouwd ben.
De 250mm Newton maakt sinds 2002 deel uit van deze setup. De newton heeft een ongebruikelijke focusmethode. Ik schuif namelijk de oculairhouder met daaraan ook de vangspiegel in de richting van de optische as op en neer. Hierdoor ontbreekt de gebruikelijke focusser en kan ik het oculair of camera heel dicht bij de tubus plaatsen. Voordeel is dat de plaats van camera of oculair heel stabiel is maar ook dat ik en relatief kleine vangspiegel kan gebruiken. De vangspiegel kan gemakkelijk vervangen worden door een ander exemplaar. Zo heb ik een grote vangspiegel voor deepskyfotografie en een kleine voor planeet waarnemingen. Bij het aanbrengen van een vangspiegel is extra aandacht besteed aan een reproduceerbare positie. Daar ben ik zodanig in geslaagd dat er meestal geen correctie voor de collimatie nodig is.
In de jaren 2010-13 heb ik de nodige modificaties aan deze setup aangebracht. Zo is de aandrijving van de uuras die in eerste instantie was aangebracht op de onderkant van de uuras verhuist naar de bovenkant bij de declinatie as. Dit om de torsie van de uuras die mogelijk was door de lengte verschil van de plaats van de declinatieas en de aandrijving weg te werken. Ook is de truusconstructie van de newton vervangen door een buis. De oude truusconstructie gaf onhandig veel verzakking als de kijker van positie veranderde.
In 2018 heb ik de Bartels (DOS)besturing vervangen door het besturingssysteem van de HEQ6.Daartoe moesten de overbrengingen van motor naar dec- en uuras worden angepast naar 705 zoals nodig voor deze synscan besturing. Dus nu wordt de kijker bestuurd door de motoren, stuurprint en handpad van de HEQ6. Via ascom en een EQDIRkabeltje kan nu de kijker rechtstreeks met de computer bestuurd worden. Ook is de kijker vehuist naar het dak van de bijkeuken. Dit pas nadat de balklaag van dat dak is versterkt door aan elke balk aan beiden zijden een extrabalk is bevestigen. Dat was nodig omdat voor die versteviging als de kijker werd gericht op een planeet en de waarnemer ging naar binnen om met de computer verder te gaan die planeet niet meer in beeld was. Het gewicht van de waarnemer naast de kijker had tot gevolg dat de kijkrichting van de kijker op een ontoelaatbare manier werd beinvloed. Nu is die invloed nog wel zichtbaar maar verstoort het werken met de kijker niet meer.


Hieronder m'n mobiele setup. Het is een HEQ6 die ik naar eigen wensen heb aangepast en heb geplaats op een eigenbouw statief volgens Duits-model (knikzuil). Het draagt een 150mm F5 en een 114mm F4 eigenbouw Newton die onderling zowel als hoofdinstrument of als volgkijker kunnen worden gebruikt.
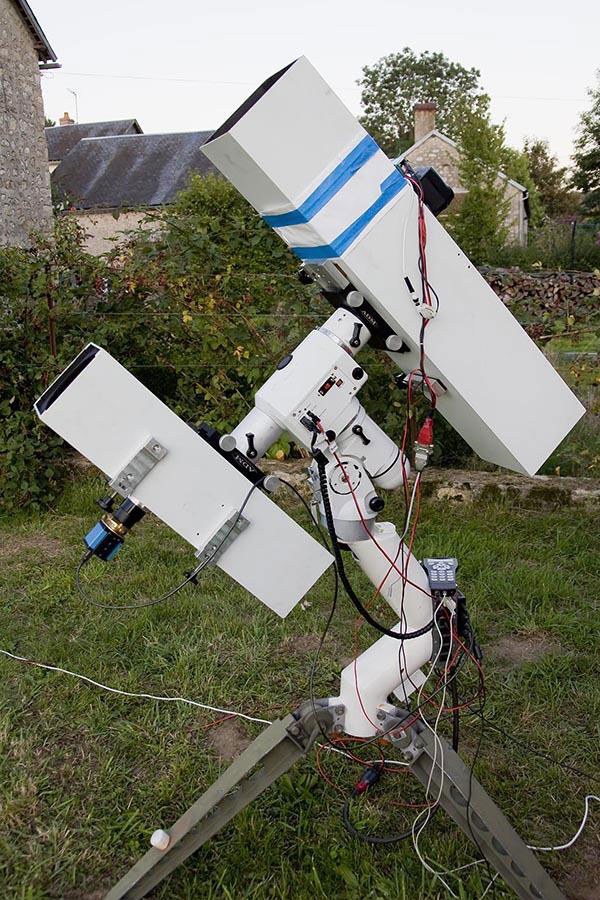
Door de aangepaste montering en statief kan ik een hele nacht fotografern zonder meridiaanflip. Daar ik op de montering een USB-hub heb geplaatst die alle signalen van montering, EOS-camera, volgcamera e.d. ontvangt, kan ik met een voedingskabel en een USB-repeater-kabel de zaak op afstand sturen. Ik heb zo zonder problemen gewerkt met 24 meter (2x 12 meter) USB-kabel tussen computer en montering. Het enige wat nog ontbreekt is de mogelijkheid om de focusmotoren te sturen maar ik hoop dit met een USB-interface kaart op te lossen.